# Quick Connections

System settings in the function is still perfect, can only use the modified mac address.
STEP 1 Connect RobSense Phenix Pro's Serial1 port with SwarmLink node UART port.
STEP 2 Connect SwarmLink Gateway micro USB with ground station.
STEP 3 Select the ground station serial number, baud rate, click open serial port.
# Hardware parameters
CPU:ARM Cortex-M3
Working frequency:433MHz
Channel bandwidth:500KHz
Modulation mode:LoRa spread spectrum
Transmit power:20dBm
Receiving sensitivity : -148dBm
Working voltage:5V
Working current:50mA
Working temperature:-40℃-+85℃
Interface:CAN,MicroUSB,LAN
Size:60mm_37mm_11mm
Weight:20g
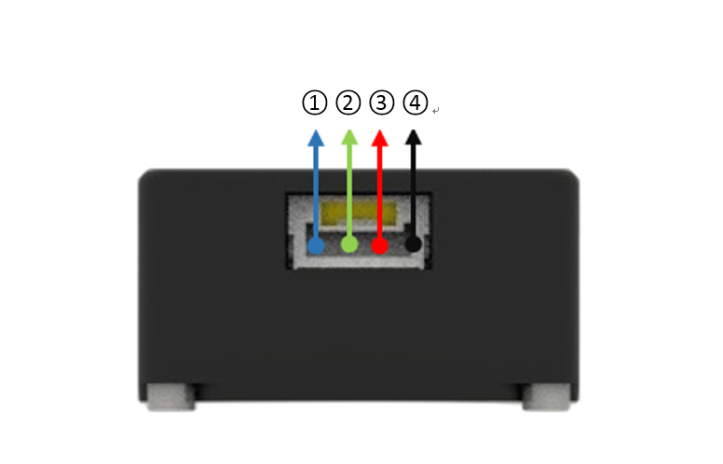
SwarmLink Node/Gateway:1.TXD 2.RXD 3.VCC 4.GND
# Flight Controller Configuration (PX4 1.7.3)
If the developer is using px4-1.7.3 version, there is need to modify original firmware. The red boxes below show the code to be modified or added.
Mavlink update:
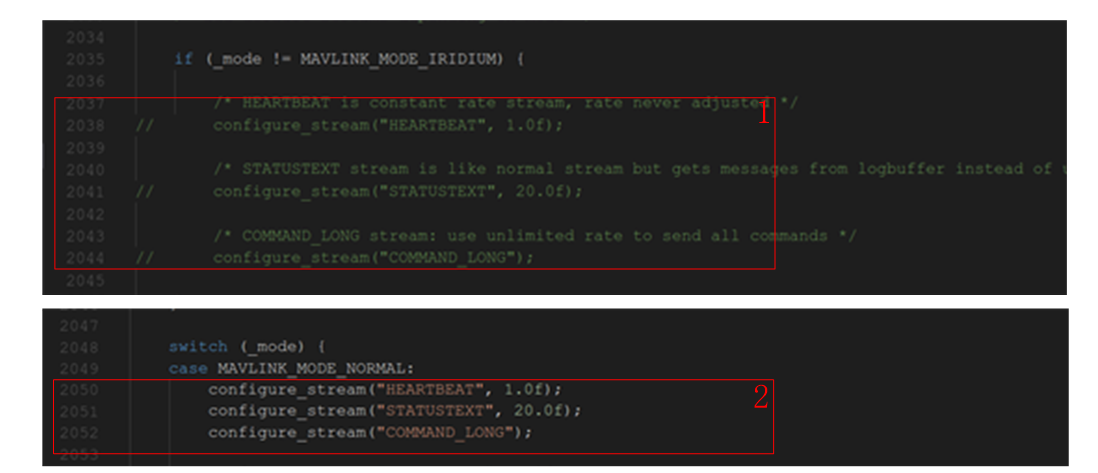
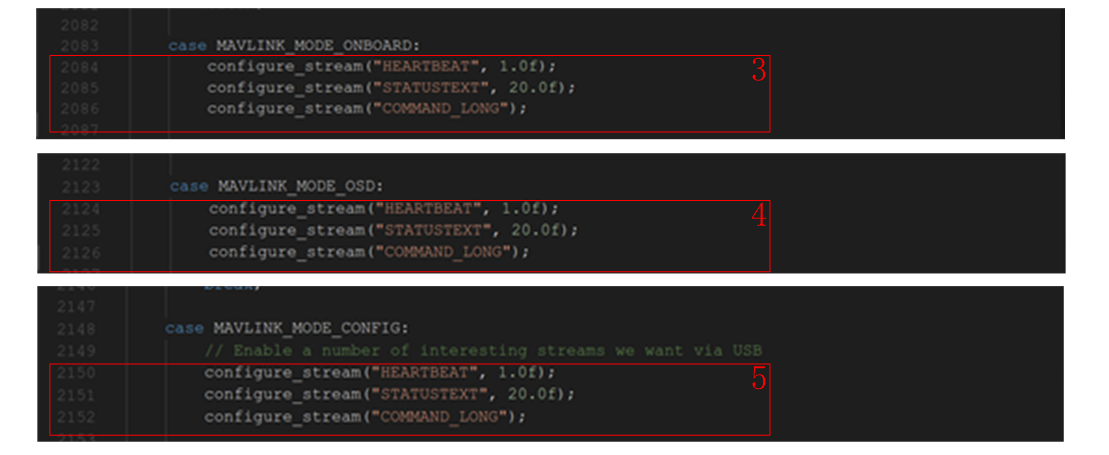
1.Find the firmware/SRC/module/mavlink/mavlink_main.cpp file.
2. Add code in the corresponding position, as shown in the 1, 2, 3, 4 and 5 steps shown above.
Turn off serial port flow control:
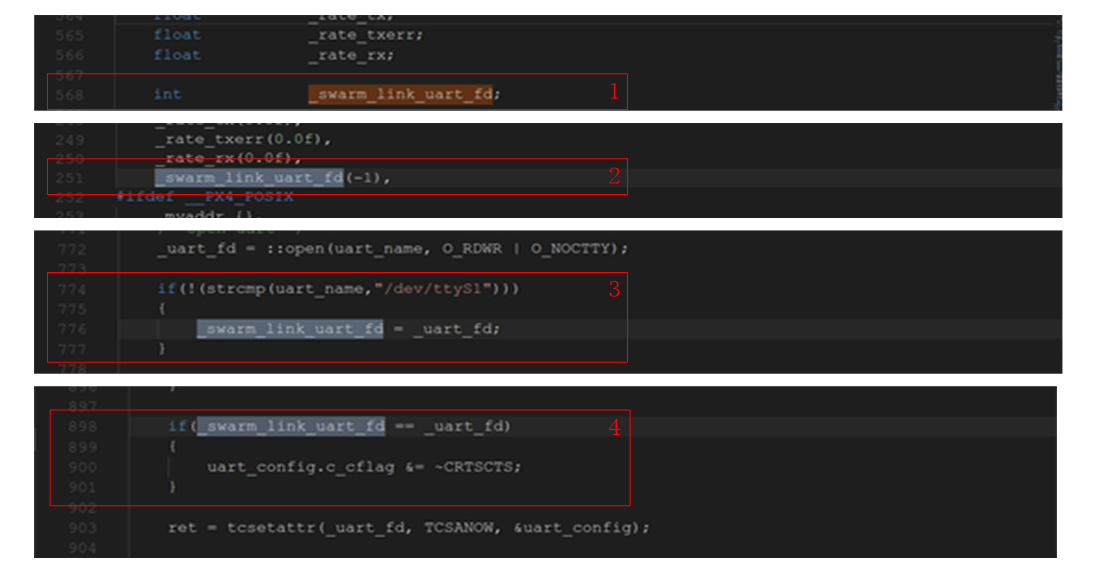
1.Find the firmware/SRC/module/mavlink/mavlink_main.h file.
2. Add code in the corresponding position, as shown in the 1 steps shown above.
3.Find the firmware/SRC/module/mavlink/mavlink_main.cpp file.
4. Add code in the corresponding position, as shown in the 2,3,4 steps shown above.
Modify boot file:
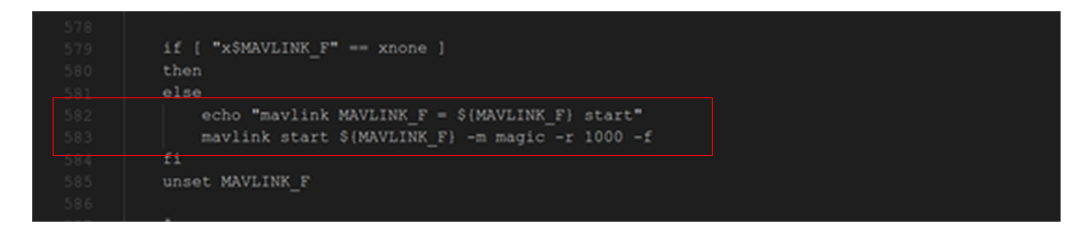
- find firmware/ROMFS/px4fmu_common/init.d/rcS file.
- add the code at the corresponding location, as shown in the red area above.