# Program the controller
# 1.Boot
Devkit support boot from sd card, copy these file to sd card:
1.PhenixPro_Devkit/BOOT.BIN
2.PhenixPro_Devkit/amp_system/linux_image/devicetree.dtb
3.PhenixPro_Devkit/amp_system/linux_image/uImage
4.PhenixPro_Devkit/amp_system/linux_image/uramdisk.image.gz
Note:
The directory of PhenixPro Devkit is RobSenseTech/PhenixPro_Devkit_V2.0...
set DIP switch like the image below(it means boot from sd card):
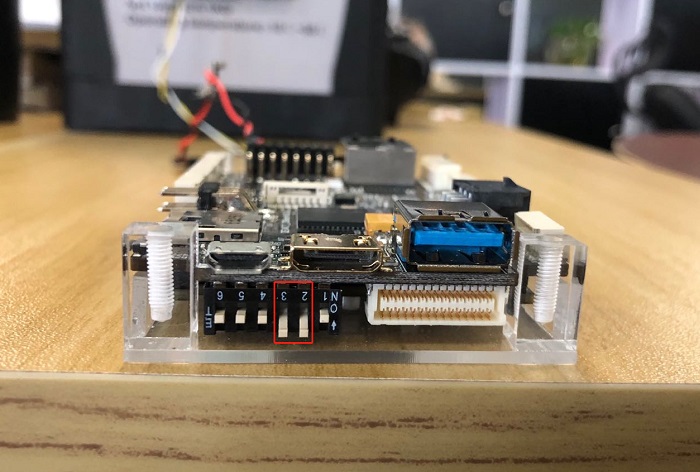
And the he print information is similar to general Linux startup information.
# 2.Connect UAV Components
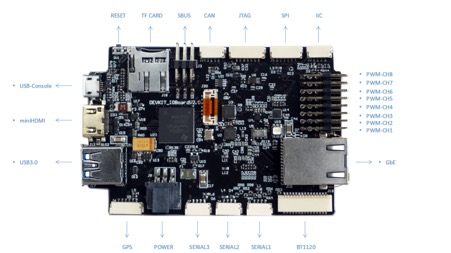
As red words in image above, we can connect UAV component like this:
- Remote control receiver connect to SBUS (pin order from top to bottom is signal, vcc, GND)
- Four motors connected to MOTO 1 to 4, respectively (pin order from top to bottom is signal, vcc, GND)
- Ground station can be connected through SERIAL 4 port on the board with baudrate 115200, while through other SERIAL ports with baudrate 57600.
- Connect power distribution board to POWER
- UAV head direction is the same as x axis which is marked in red box